
Meet “Walk Me” : The AI chair that climbs stairs
At the Japan Mobility Show 2025 in Tokyo, Toyota unveiled a creation that left the audience momentarily speechless before bursting into applause: a wheelchair without wheels. The world’s largest automaker introduced “Walk Me,” a prototype walking wheelchair that fuses robotics, artificial intelligence, and accessibility design into one extraordinary vision of the future. With four robotic legs instead of traditional wheels, it promises a new era of mobility, one where technology doesn’t just move people, but walks alongside them.
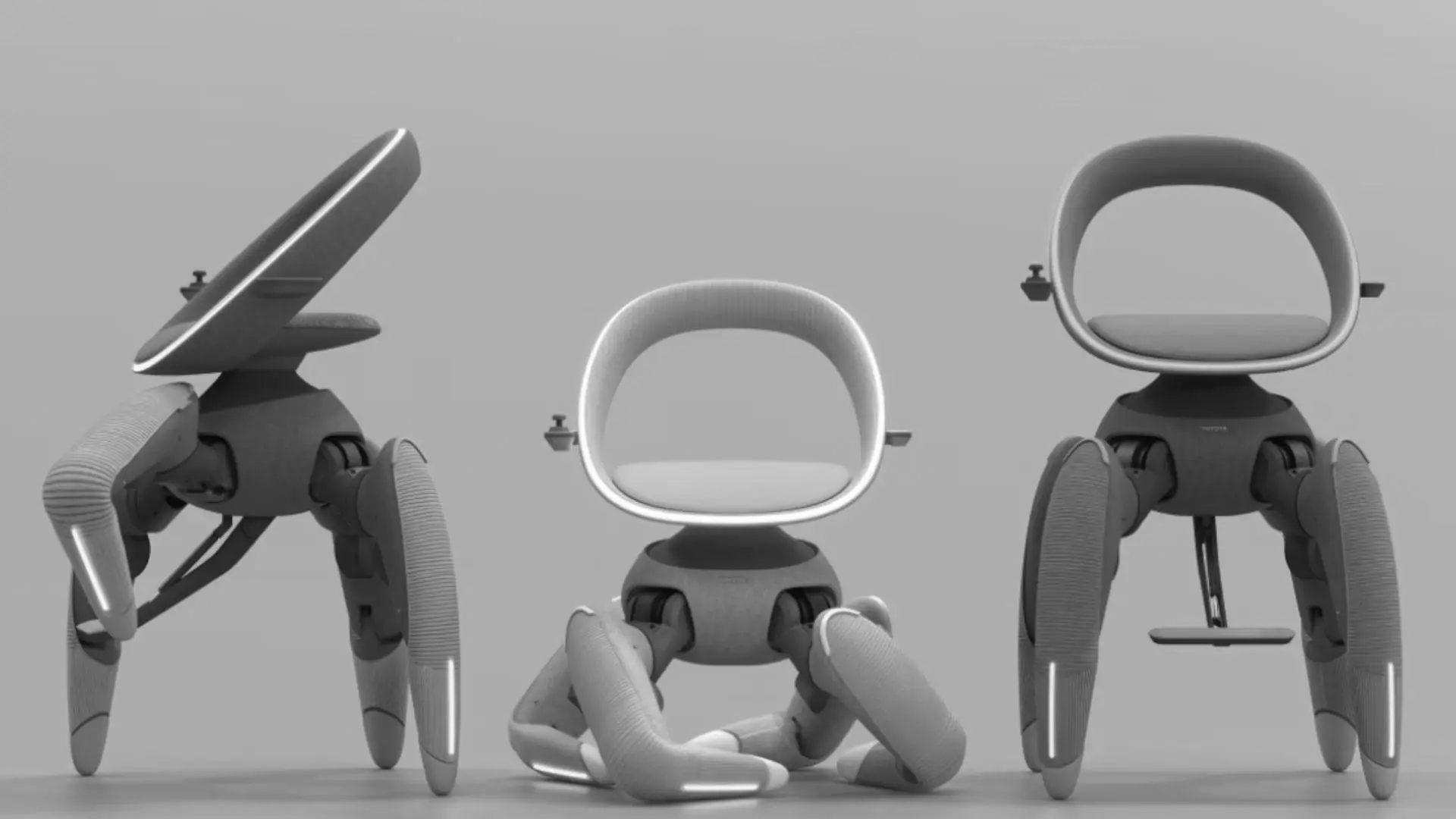
Instead of rolling forward on tires, Walk Me walks using four robotic legs that bend, balance, and climb like a living creature. Designed to restore true mobility and independence to people with disabilities or limited mobility, it marks Toyota’s growing ambition to extend beyond cars into the realm of robotic mobility ecosystems. This new vision focuses on moving people safely and autonomously in any environment, not just on roads.
From* *w* *heels to* *l* *egs : The* *r* *obotics* *l* *eap
At the heart of Walk Me lies a fundamental engineering breakthrough: a legged locomotion system adapted from the world of robotics. Each of its four legs contains multiple joints powered by compact, high-precision actuators. These j oints allow the chair to lift, pivot, and step with a grace that resembles biological movement more than mechanical motion. The technology draws inspiration from quadrupedal robots, such as those used in industrial or search-and-rescue settings, but it has been miniaturized and refined for personal use.
Unlike traditional wheelchairs, which falter on stairs or uneven ground, Walk Me uses AI-driven gait control to adjust its balance dynamically. Sensors detect the incline or obstacle ahead, and the onbo ard processor calculates in milliseconds how each leg should move to maintain stability. The result is a chair capable of tackling stairs, curbs, and even gravel paths, a level of mobility previously unimaginable in personal assistive devices. As one Toyota engineer described during the demonstration, “It’s not just mobility, it’s motion intelligence.”
Seeing and* *f* *eeling the* *w* *orld :
The mechanical ingenuity of Walk Me is matched by its perceptual intelligence. Hidden within its smooth, shell-like design is a dense network of sensors that give the wheelchair an almost lifelike awareness of its surroundings. Using LIDAR and infrared systems, it scans the terrain ahead to map every step and obstacle in three dimensions. Meanwhile, inertial measurement units (IMUs) track the orientation and tilt of the chair, constantly recalibrating to maintain balance.
At the same time, force and pressure sensors embedded in the legs monitor the ground beneath each “foot,” measuring traction and adjusting weight distribution to prevent slipping. The data from these sensors flows continuously into Toyota’s motion-planning AI, which interprets the environment in real time and determines the safest, most stable way to move forward. The result is a machine that doesn’t just see it feels the terrain, responding with human-like sensitivity.
AI* *t* *hat* *l* *earns to* *m* *ove :
What truly elevates Walk Me beyond existing robotic devices is its AI-powered motion planning system. The algorithms governing its movement are derived from Toyota’s experience in autonomous driving specifically, its Mobility Teammate Platform, which enables vehicles to navigate complex roads safely. Those same principles of path prediction, obstacle avoidance, and adaptive control have been reimagined here for human-scale motion.
Through reinforcement learning and high-fidelity simulation, the system learns how to adapt its walking patterns to new environments. It can climb stairs one at a time, cross pebbled or sandy paths, lower itself gently to the floor, or fold its legs entirely for transport. When powered on, the chair automatically unfolds, balances, and waits for user input. It is effe ctively a self-deploying mobility robot that learns to move with both intelligence and empathy.
Human–* *m* *achine* *h* *armony :
While th e underlying robotics are advanced, Toyota’s design philosophy emphasizes simplicity and dignity for the user. Walk Me offers a dual-mode control interface, blending manual and autonomous operation. Users can steer with traditional handles when they prefer control, or switch to a digital touchscreen interface or even voice commands for autonomous navigation. The system is designed to interpret intent, adjustin g its level of assistance based on how actively the user participates.
This human–machine harmony represents Toyota’s broader vision of robotics not as a replacement for human ability, but as an extension of it. Technology, in this view, should enhance capability without diminishing autonomy, a principle reflected in every aspect of Walk Me’s design.
Design* *t* *hat* *m* *oves with* *y* *ou :
Aest hetically, Walk Me departs from the cold, metallic look of most robotic devices. Its outer shell is soft, organic, and minimalist, hiding the complex machinery within. Every curve has a purpose: to protect internal components, reduce noise, and evoke a sense of comfort rather than clinical precision. The ergonomic seat maintains upright post ure and distributes weight evenly, allowing users to remain comfortable for extended periods.
When inactive, the legs fold neatly beneath the chair, transforming it into a compact, portable form. Once activated, it rises smoothly to its full height and stabilizes itself before taking its first step. This seamless transformation highlights Toyota’s expertise in mechatronics, the delicate choreography of mechanical, electrical, and digital systems working together in motion.
Toyota’s* *r* *obotic* *v* *ision :
Walk Me b uilds upon Toyota’s long-standing exploration of robotics. Previous projects such as the Human Support Robot (HSR) and the T-HR3 humanoid robot demonstrated the company’s commitment to assistive and teleoperated technologies. However, this latest innovation shifts focus from robotic assistance within homes to autonomous mobility in public spaces. It embodies Toyota’s philosophy of “Mobility for All,” where technology expands human freedom rather than limiting it.
At the Japan Mobility Show 2025, Walk Me stood as a powerful symbol of that vision. Amid electric vehicles and futuristic concepts, it was a reminder that the future of mobility is not only about speed or efficiency but about inclusion ensuring that everyone can move through the world with confidence.
The* *r* *oad* *a* *head :
Still in its prototype phase, Walk Me is more a vision of what’s possible than a product ready for market. Yet its implications are profound. It merges the sophistication of self-driving systems with the compassion of assistive design, redefining what a wheelchair can be. Analysts at the event suggested that Toyota’s innovation could spark a new category in personal robotics, one where mobility devices are intelligent, autonomous, and emotionally attuned to their users.
As one industry expert at the show observed, “Toyota’s Walk Me does for wheelchairs what electric vehicles did for cars it redefines the category entirely.”
A* *f* *uture* *t* *hat* *w* *alks* *w* *ith* *y* *ou :
In essence, Toyota’s Walk Me is a fusion of robotics, artificial intelligence, and human-centered engineering. It represents the next frontier in mobility, not just transportation, but transformation. By teaching a wheelchair to walk, Toyota has taken a bold step toward a world where technology adapts to people, not the other way around.
In this new era of intelligent machines, mobility will not just be about getting from place to place. It will be about moving with purpose, dignity, and freedom and Walk Me might just be the first step on that path.